A Física como Linguagem Matemática
O espaço onde a física acontece
Podemos imaginar o espaço como o palco onde todos os fenômenos físicos se desenrolam. Mas surge uma pergunta fundamental: o que exatamente significa dizer a posição de algo?
Quando falamos em posição, estamos descrevendo uma forma de relacionar dois pontos: o ponto que queremos localizar e um ponto de referência fixo, chamado origem. Para estabelecer essa relação, usamos coordenadas – números que indicam “quão longe” e “em que direção” estamos em relação à origem.
No caso mais simples, consideramos o espaço como uma linha reta e medimos distâncias diretas entre os pontos. Cada posição pode então ser associada a um único número que representa a distância até a origem (número cuja natureza matemática ainda vamos explorar).
Exercícios
- Explique com suas próprias palavras o que significa a posição de um objeto em relação a um ponto de referência. Por que a escolha da origem é importante?
- Qual é a diferença entre descrever a posição de um ponto em uma linha reta e em um plano ou espaço tridimensional?
Como medimos distâncias
Para atribuir um número a uma distância, precisamos de um padrão: podemos imaginar um segmento-padrão, nossa unidade de comprimento, e contar quantos desses segmentos “cabem” entre dois pontos. É esse processo que define o número usado para representar a distância.
Se quisermos medir com mais precisão, basta escolher um segmento-padrão menor, permitindo contar frações menores do caminho entre os pontos.
Pergunta fundamental
Será que existe uma unidade mínima, indivisível, que sirva para medir tudo? Se essa unidade existisse, nosso modelo do espaço seria discreto, formado por “blocos” indivisíveis, em vez de um continuum.
Exercícios
- Explique por que é necessário definir uma unidade de comprimento antes de medir distâncias.
Pitágoras contra o discreto
Pensemos no Teorema de Pitágoras: \[ c^2 = a^2 + b^2 \]
Se tomarmos \(a = b = 1\) (em unidades do segmento-padrão), então: \[ c = \sqrt{2} \]
O problema é que:
\[
\sqrt{2} \notin \mathbb{Q}
\]
ou seja, não pode ser escrito como uma fração \(\frac{p}{q}\) com \(p, q \in \mathbb{Z}\) e \(q \neq 0\).
Isso implica que, se existisse uma unidade mínima fixa, não conseguiríamos manter o Teorema de Pitágoras exatamente válido.
Conclusão provisória: ou o espaço não é discreto, ou o teorema é apenas uma aproximação de uma estrutura mais fundamental.
Exercícios
- Explique por que \(\sqrt{2}\) não pode ser expresso como uma fração \(\frac{p}{q}\) e como isso se relaciona com a ideia de um espaço discreto.
- Discuta o que a impossibilidade de representar exatamente certas distâncias com um segmento-padrão sugere sobre a natureza do espaço.
- Usando (\(a = b = 1\)), calcule (c) aproximando-o por frações simples, como \(c \approx \frac{7}{5}\) ou \(c \approx \frac{10}{7}\). Qual é o erro relativo em cada aproximação?
Hipótese da física clássica
Na física clássica, adotamos a hipótese de que o espaço é contínuo. Isso significa que, em princípio, podemos medir distâncias arbitrariamente pequenas, sem um limite mínimo definido.
Embora não saibamos exatamente por que isso ocorre, modelamos as posições assumindo implicitamente que qualquer distância, por menor que seja, pode ser medida. Vale ressaltar que não há uma prova empírica definitiva de que o espaço é contínuo. Essa continuidade é uma das hipóteses fundamentais que adotamos, e dela derivam diversas consequências importantes para outras teorias, como a teoria de campos, a mecânica quântica e a relatividade.
Dessa forma, cada posição pode ser representada por um número real, que pode ser racional ou irracional.
Exercícios
- Explique o que significa assumir que o espaço é contínuo na física clássica.
- Por que números reais são usados para representar posições no espaço contínuo?
Conjuntos numéricos
Para organizar as ideias, temos os seguintes conjuntos numéricos:
- \(\mathbb{N}\): números naturais: \(0, 1, 2, 3, \dots\)
- \(\mathbb{Z}\): números inteiros: \(\dots, -2, -1, 0, 1, 2, \dots\)
- \(\mathbb{Q}\): números racionais: frações da forma \(\frac{p}{q}\), com \(p, q \in \mathbb{Z}\) e \(q \neq 0\)
- Números irracionais: não podem ser escritos como fração (exemplos: \(\sqrt{2}\), \(\pi\), \(e\), …)
- \(\mathbb{R}\): números reais: a união dos racionais e irracionais, ou seja, \(\mathbb{Q} \cup\) (irracionais)
Exercícios
- Dê exemplos de números que pertencem a cada um dos conjuntos (\(\mathbb{N}\)), (\(\mathbb{Z}\)), (\(\mathbb{Q}\)) e irracionais.
- Explique a relação entre os conjuntos \(\mathbb{Q}\) e \(\mathbb{R}\).
- Classifique os seguintes números nos conjuntos corretos: \(0, -3, \frac{5}{2}, \sqrt{2}, \pi\).
O paradoxo de Zenão e as séries infinitas
Imagine que queremos andar de um ponto A até um ponto B separados por \(1\) metro.
- \(1^\circ\) passo: metade do caminho, ou seja, \(\frac{1}{2}\) m.
- \(2^\circ\) passo: metade do que resta, \(\frac{1}{4}\) m.
- \(3^\circ\) passo: metade novamente, \(\frac{1}{8}\) m… e assim por diante.
Podemos expressar essa sequência usando o símbolo de somatório: \[ d = \sum_{n=1}^\infty \frac{1}{2^n}. \]
Resolvendo a soma
Começamos com: \[ d = \frac{1}{2} + \frac{1}{4} + \frac{1}{8} + \dots \]
Multiplicando ambos os lados por \(\frac{1}{2}\): \[ \frac{d}{2} = \frac{1}{4} + \frac{1}{8} + \dots \]
Subtraindo as duas expressões: \[ d - \frac{d}{2} = \frac{1}{2}, \] \[ \frac{d}{2} = \frac{1}{2}, \] \[ d = 1. \]
Ou seja, somando infinitos pedaços cada vez menores, obtemos um comprimento finito.
Mais do que isso: além do Teorema de Pitágoras, esse resultado mostra que as distâncias podem ser compostas por somas infinitas de números racionais. Isso reforça que nosso modelo de espaço contínuo precisa ser representado por números reais, que incluem tanto os racionais quanto os irracionais.
Conclusão
O modelo contínuo do espaço nos leva naturalmente ao uso dos números reais \(\mathbb{R}\), que incluem tanto racionais quanto irracionais, e nos permite trabalhar com distâncias expressas como somas infinitas.
Na física, essa suposição de continuidade está tão enraizada que aparece mesmo nos problemas mais simples, mas também levanta questões profundas: será que, em escalas muito pequenas, o espaço é realmente contínuo?
Exercícios
- Explique com suas próprias palavras o paradoxo de Zenão e como a soma infinita resolve a aparente contradição.
- Calcule a soma da série \(\sum_{n=1}^{\infty} \frac{1}{3^n}\) e interprete o resultado no contexto de uma distância percorrida em passos que diminuem a cada movimento.
- Por que a existência de somas infinitas de números racionais reforça a necessidade de usar números reais para modelar o espaço contínuo?
Dimensões do espaço
Quando pensamos no “tamanho” do espaço, a primeira coisa que vem à mente é quantos pontos ele contém. Por exemplo, o conjunto dos números inteiros \(\mathbb{Z}\) é infinito, mas é um infinito contável: podemos listar seus elementos um a um, ou seja, existe uma forma de associar cada inteiro a um número natural de forma unívoca.
Já o conjunto dos números reais \(\mathbb{R}\) é infinito incontável: há muito mais números reais do que inteiros, a ponto de não ser possível associar cada real a um inteiro de forma unívoca.
Assim, nosso espaço, modelado pelos números reais, inclui uma infinidade incontável de pontos.
Mas o número de pontos não é a única forma de medir o “tamanho” do espaço. Existe um conceito diferente e fundamental: a dimensão.
Nossa experiência mostra que, para localizar um ponto no espaço, usamos três números, as coordenadas \(x\), \(y\) e \(z\), que indicam a posição em três direções mutuamente perpendiculares. Escolhemos uma origem e três direções que formam ângulos retos (\(90^\circ\)) entre si, e medimos distâncias ao longo dessas direções usando números reais, como discutimos antes. Ou seja, primeiro andamos em uma direção \(x\), depois em outra \(y\) e, por fim, em outra \(z\), até chegar ao ponto desejado. O interessante é que sempre conseguimos alcançar qualquer ponto usando esse procedimento, e a ordem dos passos não altera o resultado.
Esses três números são suficientes para identificar qualquer ponto do espaço físico que conhecemos.
Exercícios
- Explique a diferença entre infinito contável e infinito incontável. Dê exemplos de cada caso.
- Por que usamos três coordenadas para localizar um ponto no espaço físico?
Produto cartesiano
Para descrever matematicamente esse conjunto de pontos, usamos o conceito de produto cartesiano.
Começamos com: \[
\mathbb{R} \times \mathbb{R} \equiv \{(x, y) \mid x, y \in \mathbb{R}\},
\] ou seja, o conjunto de pares ordenados: elementos formados por dois números reais em uma ordem definida (importante porque \((x,y)\) geralmente não é o mesmo que \((y,x)\)).
Esse novo conjunto é chamado de \(\mathbb{R}^2\).
Agora, aplicando novamente o produto cartesiano, construímos o conjunto tridimensional de pontos do espaço: \[ \mathbb{R}^2 \times \mathbb{R} \equiv \{((x, y), z) \mid (x, y) \in \mathbb{R}^2, z \in \mathbb{R}\}. \] Porém, o elemento \(((x, y), z)\) é matematicamente equivalente ao triplo ordenado \((x, y, z)\), e por isso escrevemos: \[ \mathbb{R}^3 \equiv \{(x, y, z) \mid x, y, z \in \mathbb{R}\}. \]
Essa construção não é apenas formal, ela reflete a nossa própria forma de localizar pontos no espaço.
Exercícios
- Explique o que é o produto cartesiano e como ele nos ajuda a construir (\(\mathbb{R}^2\)) e (\(\mathbb{R}^3\)).
- Liste cinco elementos quaisquer de (\(\mathbb{R}^2\)) e cinco elementos de (\(\mathbb{R}^3\)).
- Por que a ordem dos elementos em um par ou triplo ordenado é importante?
Operações no produto cartesiano
Além disso, podemos definir operações nesse conjunto usando as operações já conhecidas dos números reais. Por exemplo, ao dizer que andamos primeiro na direção \(x\) e depois na direção \(y\), estamos compondo os pontos \((x, 0)\) e \((0, y)\) para obter o ponto \((x, y)\).
Essa composição é chamada de adição e é definida como: \[
(x, y) + (x', y') = (x + x', y + y'),
\] ou seja, somamos as componentes separadamente, estendendo o conceito de soma dos números reais para os pares ordenados e, por analogia, para trios ordenados também.
Note que, como a ordem da soma das componentes não altera o resultado, o mesmo acontece com os pares ou trios ordenados, isso reflete a nossa experiência física e a propriedade comutativa da adição.
Outra operação importante é a multiplicação por um número real (escalar). Se multiplicarmos as coordenadas do ponto por um número real \(k\), obtemos: \[ k (x, y) = (kx, ky), \] ou seja, multiplicamos cada componente separadamente, estendendo o conceito de produto dos números reais para os pares ordenados. Analogamente, para o espaço tridimensional: \[ k (x, y, z) = (kx, ky, kz). \] Essa operação permite ampliar ou reduzir as distâncias, mantendo a direção das coordenadas proporcional.
Exercícios
- Explique como a adição de pares ou trios ordenados se relaciona com a soma de números reais.
- Calcule \((2, -1) + (3, 4)\) e \(2 \cdot (1, -3, 2)\).
- Por que a multiplicação por um escalar mantém a direção do ponto, mas altera sua distância à origem?
Espaço Vetorial
As operações definidas acima, a adição de pares ordenados e a multiplicação por escalares, são exemplos de como podemos construir uma estrutura matemática mais geral, chamada espaço vetorial.
Um espaço vetorial é um conjunto de objetos (que chamaremos de vetores) sobre os quais estão definidas duas operações:
Adição de vetores: a partir de dois vetores, obtemos um terceiro vetor do mesmo conjunto.
No caso do plano cartesiano \(\mathbb{R}^2\), essa operação é: \[ (x, y) + (x', y') = (x + x', y + y'). \]Multiplicação por escalar: a partir de um vetor e de um número real, obtemos um novo vetor do mesmo conjunto.
Por exemplo: \[ k(x, y) = (kx, ky), \quad k \in \mathbb{R}. \]
Essas duas operações devem satisfazer certas propriedades chamadas axiomas de espaço vetorial, como:
- Associatividade da adição: \((u + v) + w = u + (v + w)\).
- Comutatividade da adição: \(u + v = v + u\).
- Elemento neutro: existe um vetor \(0\) tal que \(u + 0 = u\).
- Elemento oposto: para todo vetor \(u\), existe \(-u\) tal que \(u + (-u) = 0\).
- Distributividade: \(k(u + v) = ku + kv\) e \((k + m)u = ku + mu\).
- Compatibilidade: \(k(mu) = (km)u\).
- Unidade: \(1 \cdot u = u\).
No caso do plano \(\mathbb{R}^2\) e do espaço tridimensional \(\mathbb{R}^3\), todas essas propriedades são satisfeitas. Portanto, \((\mathbb{R}^2, +, \cdot)\) e \((\mathbb{R}^3, +, \cdot)\) são exemplos de espaços vetoriais sobre o conjunto dos números reais.
Essa estrutura será a base para o estudo da Geometria Analítica e da Álgebra Linear, permitindo tratar vetores não apenas como “setas no espaço”, mas como objetos matemáticos com propriedades bem definidas.
Independência Linear
No espaço vetorial, uma questão importante é entender quando um vetor pode ser obtido a partir de outros.
Para isso, introduzimos a ideia de combinação linear.
Dizemos que um vetor \(v\) é uma combinação linear de \(v_1\) e \(v_2\) se existem números reais \(a\) e \(b\) tais que \[ v = a v_1 + b v_2. \]
Um caso especial é quando a combinação linear resulta no vetor nulo: \[ a v_1 + b v_2 = 0. \] O problema é determinar para quais valores de \(a\) e \(b\) essa igualdade é possível.
- Se a única solução é \(a = b = 0\), então \(v_1\) e \(v_2\) são chamados linearmente independentes (L.I.).
- Se existir uma solução diferente de \(a = b = 0\), então \(v_1\) e \(v_2\) são linearmente dependentes (L.D.).
Quantos vetores linearmente independentes cabem em \(\mathbb{R}^2\)?
No plano \(\mathbb{R}^2\), no máximo dois vetores podem ser linearmente independentes.
Isso significa que qualquer conjunto com três ou mais vetores em \(\mathbb{R}^2\) será necessariamente linearmente dependente.
Exemplo: os vetores \((1,1)\), \((1,-1)\) e \((x,y)\)
Vamos analisar o conjunto \[ \{ (1,1), (1,-1), (x,y) \}. \]
Se esses três vetores fossem linearmente independentes, a única solução da equação \[ a(1,1) + b(1,-1) + c(x,y) = (0,0) \] seria \(a = b = c = 0\).
Expandindo: \[ a(1,1) + b(1,-1) + c(x,y) = (a+b+cx,\, a-b+cy). \]
Para que o resultado seja \((0,0)\), temos o sistema: \[ \begin{cases} a + b + cx = 0 \\ a - b + cy = 0 \end{cases} \]
Esse sistema tem sempre soluções não triviais (com \(a, b, c\) não todos nulos).
Portanto, os três vetores são linearmente dependentes para qualquer valor de \(x\) e \(y\).
Assim, concluímos que em \(\mathbb{R}^2\) só é possível ter até dois vetores linearmente independentes, o que está em acordo com a dimensão do espaço.
Dimensão
Até aqui vimos que em \(\mathbb{R}^2\) só podemos ter no máximo dois vetores linearmente independentes.
Esse número máximo de vetores linearmente independentes em um espaço vetorial é chamado de sua dimensão.
De forma geral:
- A dimensão de um espaço vetorial é o número de vetores em uma base, isto é, o número máximo de vetores linearmente independentes que podem existir nesse espaço.
Por exemplo:
- Em \(\mathbb{R}^1\), apenas um vetor pode ser linearmente independente, logo \(\dim(\mathbb{R}^1) = 1\).
- Em \(\mathbb{R}^2\), até dois vetores podem ser linearmente independentes, logo \(\dim(\mathbb{R}^2) = 2\).
- Em \(\mathbb{R}^3\), até três vetores podem ser linearmente independentes, logo \(\dim(\mathbb{R}^3) = 3\).
Assim, o conceito de dimensão nos permite medir, de forma matemática, quantas direções independentes existem em um espaço vetorial.
Esse resultado conecta-se ao nosso objetivo inicial: compreender e medir o espaço onde a física acontece.
Vimos que, embora cada conjunto numérico (como os reais) contenha um número incontável de pontos, podemos distinguir diferentes espaços, reta, plano e espaço tridimensional, pelo número de direções independentes que eles possuem.
A dimensão é, portanto, a medida fundamental que caracteriza a estrutura do espaço.
Exercícios
- Defina em suas palavras o que é um espaço vetorial e quais operações devem estar definidas nele.
- Verifique se os vetores \((1,0)\) e \((0,1)\) em \(\mathbb{R}^2\) são linearmente independentes.
- Explique por que três vetores quaisquer em \(\mathbb{R}^2\) são necessariamente linearmente dependentes.
- Determine a dimensão de \(\mathbb{R}^3\) e dê um exemplo de uma base para esse espaço vetorial.
- Relacione o conceito de dimensão de um espaço vetorial com a ideia de direções independentes no espaço físico.
Funções Contínuas: Definição de Limite
Para compreender o que significa uma função ser contínua, precisamos primeiro introduzir o conceito de limite.
A definição rigorosa de limite usa a linguagem de \(\varepsilon\) (épsilon) e \(\delta\) (delta), baseada no conceito de módulo:
\[ |x| = \begin{cases} x, & \text{se } x \geq 0, \\ -x, & \text{se } x < 0. \end{cases} \]
O módulo mede a distância de \(x\) até a origem.
Assim, \(|x - p|\) representa a distância entre \(x\) e \(p\). Esse é um exemplo de métrica: uma forma de medir distâncias.
Definição (Limite por \(\varepsilon\) e \(\delta\))
Dizemos que o limite de \(f(x)\) quando \(x\) tende a \(p\) é \(L\), e escrevemos \[ \lim_{x \to p} f(x) = L, \] se, para todo \(\varepsilon > 0\), existe um \(\delta > 0\) tal que \[ 0 < |x - p| < \delta \quad \Rightarrow \quad |f(x) - L| < \varepsilon. \]
Como “ler” a definição
Essa definição pode parecer compacta demais em sua forma simbólica. Para entendê-la melhor, podemos transformá-la em uma receita passo a passo:
Para todo \(\varepsilon > 0\):
Escolha um valor positivo e não nulo para \(\varepsilon\). Ele representa a margem de erro que aceitamos para \(f(x)\) em relação a \(L\).Existe um \(\delta > 0\): Dado esse \(\varepsilon\), conseguimos encontrar um \(\delta\) positivo. Esse \(\delta\) será a margem de proximidade de \(x\) em relação a \(p\).
Se \(x \in \mathbb{R}\) e \(0 < |x - p| < \delta\):
Significa que escolhemos valores de \(x\) suficientemente próximos de \(p\), mas diferentes de \(p\).Então \(|f(x) - L| < \varepsilon\):
Nessas condições, o valor de \(f(x)\) ficará dentro da margem de erro \(\varepsilon\) em torno de \(L\).
Essa estrutura mostra que o limite é, essencialmente, um jogo de aproximações:
- o \(\varepsilon\) fixa o “quanto” queremos que \(f(x)\) fique perto de \(L\),
- o \(\delta\) nos garante o “quão perto” \(x\) deve estar de \(p\) para que isso aconteça.
Esse raciocínio será a base para a definição formal de continuidade.
Code
import numpy as np
import matplotlib.pyplot as plt
# Função exemplo
def f(x):
return np.sin(x)
# Ponto onde queremos o limite
p = np.pi / 4
L = np.sin(p)
# Valores de epsilon e delta
eps = 0.2
delta = 0.4
# Intervalo para plot
x_vals = np.linspace(p - 1.5, p + 1.5, 400)
y_vals = f(x_vals)
fig, ax = plt.subplots(figsize=(8, 4))
# Gráfico da função
ax.plot(x_vals, y_vals, label=r"$f(x) = \sin(x)$")
# Linha horizontal em L
ax.axhline(L, color="black", linestyle="--")
ax.text(p + 1.1, L + 0.02, r"$L$", fontsize=12)
# Faixa |f(x) - L| < eps
ax.fill_between(
x_vals, L - eps, L + eps, color="gray", alpha=0.3, label=r"$|f(x)-L| < \varepsilon$"
)
# Linha vertical em p
ax.axvline(p, color="black", linestyle="--")
ax.text(p, -1.1, r"$p$", fontsize=12, ha="center")
# Faixa |x - p| < delta
ax.axvspan(p - delta, p + delta, color="orange", alpha=0.2, label=r"$|x-p| < \delta$")
# Destacar o ponto (p, L)
ax.plot(p, L, "ro")
ax.set_xlabel("$x$")
ax.set_ylabel("$f(x)$")
ax.legend(loc="best")
ax.set_title(r"Definição de limite por $\epsilon$ e $\delta$")
plt.show()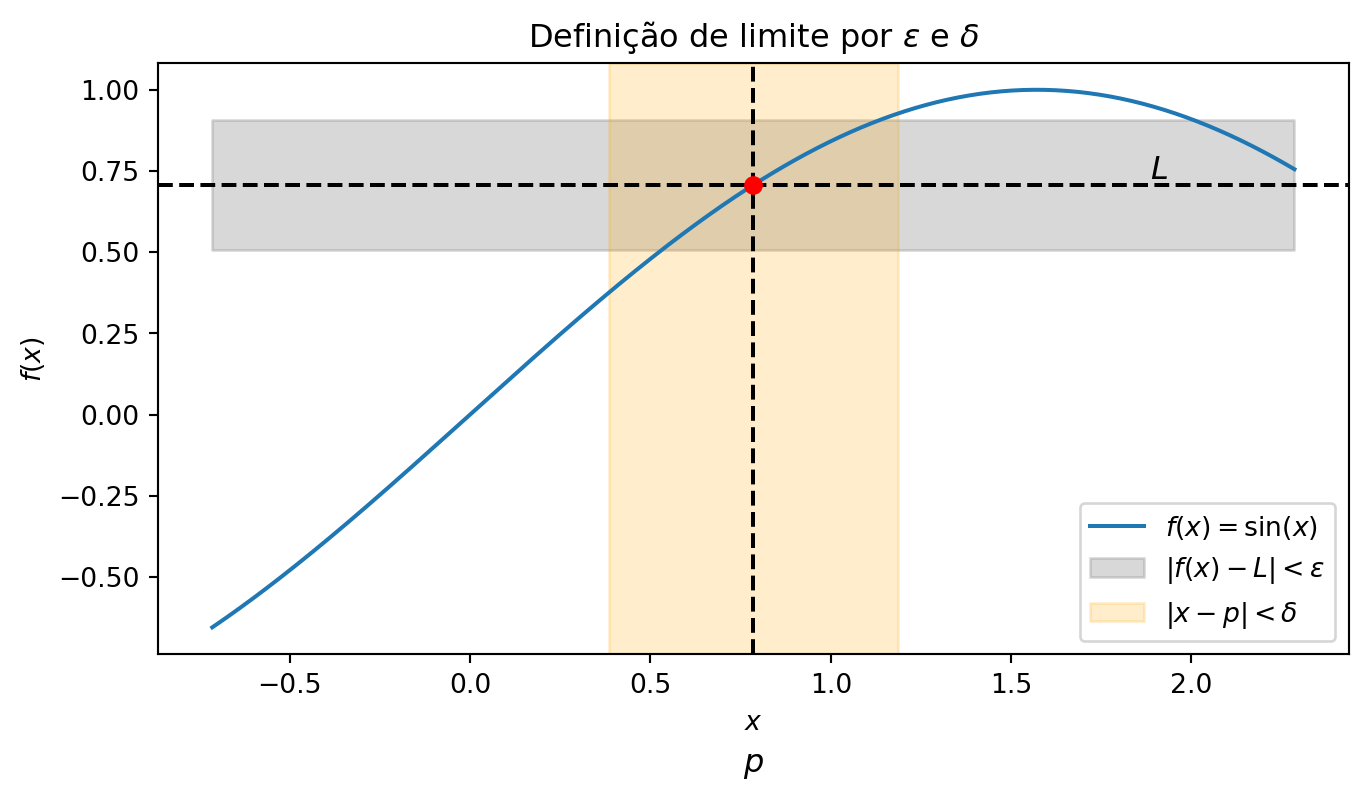
Limite visto como conjuntos
Na definição de limite usamos a desigualdade \(|f(x)-L|<\varepsilon\).
Mas esse conjunto de valores de \(f(x)\) nada mais é que o intervalo aberto \[
(L-\varepsilon,\, L+\varepsilon),
\] isto é, todos os pontos de \(y\) que ficam dentro de uma “faixa” em torno de \(L\).
Essa faixa é aberta porque não inclui as bordas \(L-\varepsilon\) e \(L+\varepsilon\).
O que acontece no domínio?
Se queremos que \(f(x)\) caia dentro dessa faixa, precisamos escolher valores de \(x\) que levem a \(f(x)\) até lá.
Ou seja, olhamos para o conjunto \[
U_\varepsilon = \{x \in \mathbb{R}: |f(x)-L|<\varepsilon\}.
\]
Esse é o conjunto dos \(x\) que produzem valores de \(f(x)\) dentro da faixa em \(y\).
Onde entram \(x_1\) e \(x_2\)?
As equações \[
f(x_1) = L - \varepsilon, \quad f(x_2) = L + \varepsilon
\] são as condições que “marcam as bordas” do intervalo em \(y\).
Os pontos \(x_1\) e \(x_2\) no domínio são justamente aqueles que fazem a função chegar exatamente nas bordas \(L-\varepsilon\) e \(L+\varepsilon\).
Assim, o intervalo \((x_1, x_2)\) no eixo-\(x\) é a região que leva a imagem da função para dentro do intervalo \((L-\varepsilon, L+\varepsilon)\) no eixo-\(y\).
Como isso ajuda a escolher \(\delta\)?
Ao fixar \(\varepsilon\), olhamos para a faixa aberta em \(y\): \[
(L-\varepsilon,\, L+\varepsilon).
\] No domínio, aparecem dois pontos importantes:
\[
f(x_1)=L-\varepsilon, \quad f(x_2)=L+\varepsilon.
\]
Esses pontos \(x_1\) e \(x_2\) marcam as “bordas” de onde \(f(x)\) ainda cai dentro da faixa em \(y\).
Se o ponto \(p\) está entre \(x_1\) e \(x_2\), então qualquer \(x\) dentro do intervalo \((x_1,\,x_2)\) satisfaz \(|f(x)-L|<\varepsilon\).
Para garantir isso em termos de \(\delta\), basta escolher uma distância que mantenha todos os \(x\) próximos de \(p\) dentro desse intervalo.
Uma forma prática é tomar \[
\delta = \min\{|x_1-p|,\, |x_2-p|\}.
\]
Com essa escolha, o intervalo \((p-\delta,\, p+\delta)\) fica inteiramente contido em \((x_1,\,x_2)\), o que garante: \[ 0<|x-p|<\delta \quad \Rightarrow \quad |f(x)-L|<\varepsilon. \]
Intuição
- O \(\varepsilon\) abre um ``tubo horizontal’’ em torno de \(L\).
- Os pontos \(x_1\) e \(x_2\) marcam onde a curva da função toca as bordas desse tubo.
- Escolher \(\delta = \min(|x_1-p|,|x_2-p|)\) garante que, ao nos aproximarmos de \(p\), permanecemos dentro desse tubo.
Assim, conseguimos traduzir a tolerância em \(y\) (dada por \(\varepsilon\)) em uma tolerância correspondente no \(x\) (dada por \(\delta\)).
Code
import numpy as np
import matplotlib.pyplot as plt
# Função exemplo
def f(x):
return np.sin(x)
# Ponto do limite
p = np.pi / 4
L = np.sin(p)
# Valores
eps = 0.2
# Encontrar x1 e x2 numericamente tais que f(x) = L ± eps
# Usando busca simples em uma malha fina em torno de p
x_vals = np.linspace(p - 2, p + 2, 2000)
y_vals = f(x_vals)
# Condições
mask_lower = np.isclose(y_vals, L - eps, atol=0.01)
mask_upper = np.isclose(y_vals, L + eps, atol=0.01)
# Aproximar x1 e x2 como os primeiros pontos que satisfazem a condição
x1_candidates = x_vals[mask_lower]
x2_candidates = x_vals[mask_upper]
x1 = x1_candidates[0] if len(x1_candidates) > 0 else p - 0.5
x2 = x2_candidates[-1] if len(x2_candidates) > 0 else p + 0.5
# Escolha de delta
delta = min(abs(x1 - p), abs(x2 - p))
fig, ax = plt.subplots(figsize=(8, 4))
# Plot função
ax.plot(x_vals, y_vals, label=r"$f(x) = \sin(x)$")
# Linhas horizontais L±eps
ax.axhline(L + eps, color="gray", linestyle="--")
ax.axhline(L - eps, color="gray", linestyle="--")
ax.fill_between(
x_vals, L - eps, L + eps, color="gray", alpha=0.2, label=r"$|f(x)-L|<\varepsilon$"
)
# Linha vertical em p
ax.axvline(p, color="black", linestyle="--")
ax.text(p, -1.2, r"$p$", ha="center")
# Marcar x1, x2
ax.axvline(x1, color="blue", linestyle="--")
ax.axvline(x2, color="blue", linestyle="--")
ax.text(x1, -1.0, r"$x_1$", ha="left", color="blue")
ax.text(x2, -1.0, r"$x_2$", ha="left", color="blue")
# Região delta em torno de p
ax.axvspan(p - delta, p + delta, color="orange", alpha=0.3, label=r"$|x-p|<\delta$")
# Ponto limite
ax.plot(p, L, "ro")
ax.set_xlabel("$x$")
ax.set_ylabel("$f(x)$")
ax.legend(loc="best")
ax.set_title(r"Escolha de $\delta$ a partir de $x_1$ e $x_2$")
plt.show()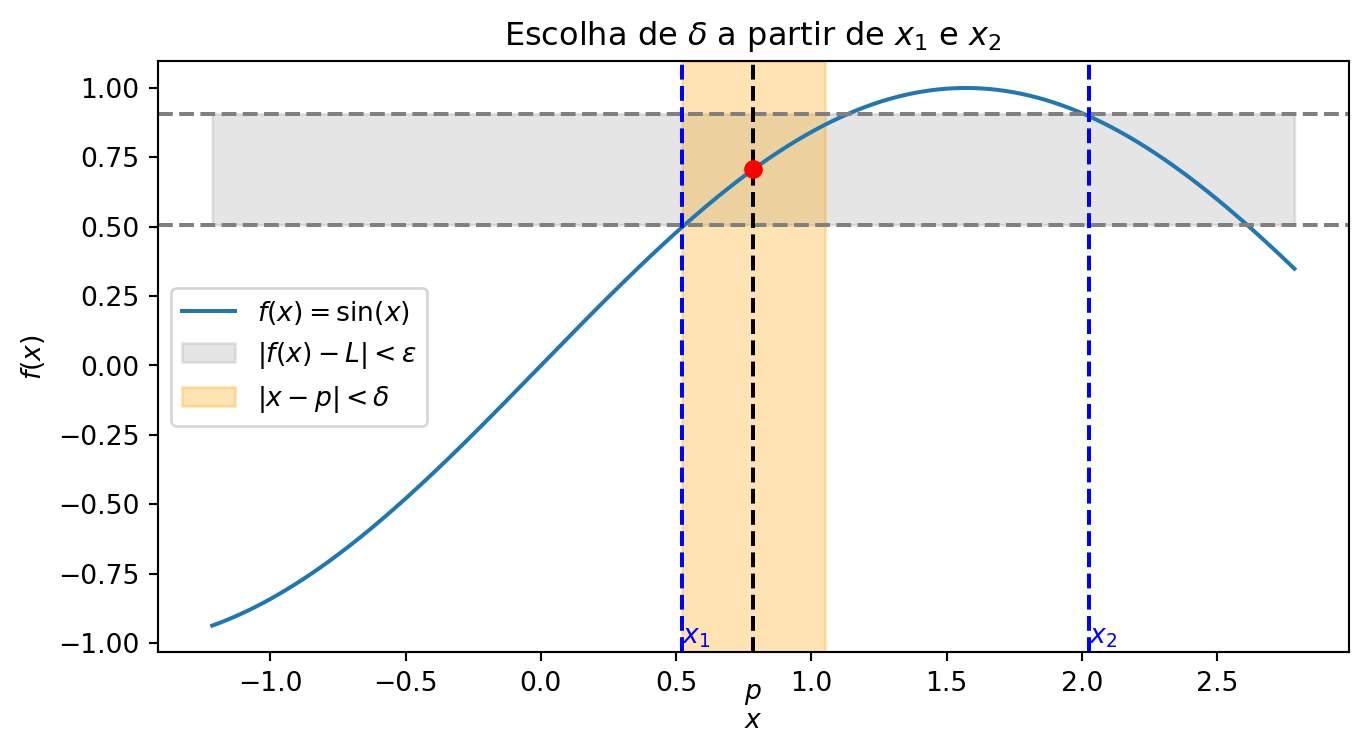
Exemplo com Descontinuidade
Quando uma função apresenta uma descontinuidade em um ponto \(p\), a definição de limite \(\lim_{x \to p} f(x) = L\) falha. Vejamos um exemplo concreto:
Considere a função definida por partes: \[ f(x) = \begin{cases} x & \text{se } x < 1 \\ 2x^2 & \text{se } x \geq 1 \end{cases} \]
No ponto \(x = 1\), suponha que tentamos provar que \(\lim_{x \to 1} f(x) = 2\). Escolhemos \(\varepsilon = 0.1\).
Queremos encontrar \(\delta > 0\) tal que o conjunto: \[ \{x \in \mathbb{R} : 0 < |x - 1| < \delta\} \] esteja contido no conjunto: \[ \{x \in \mathbb{R} : |f(x) - 2| < 0.1\} \]
Análise do conjunto onde \(|f(x) - 2| < 0.1\):
Para \(x \geq 1\) (usando \(f(x) = 2x^2\)): \[ |2x^2 - 2| < 0.1 \Rightarrow 1.9 < 2x^2 < 2.1 \Rightarrow x \in (\sqrt{0.95}, \sqrt{1.05}) \approx (0.975, 1.025) \] Como esse ramo só vale para \(x \geq 1\), a parte relevante desse intervalo é \([1, 1.025)\).
Para \(x < 1\) (usando \(f(x) = x\)): \[ |x - 2| < 0.1 \Rightarrow x \in (1.9, 2.1) \] Esse intervalo não intersecta o domínio \(x < 1\) desse ramo, ou seja, nenhum ponto com \(x < 1\) satisfaz \(|f(x) - 2| < 0.1\).
Portanto, o conjunto total onde \(|f(x) - 2| < 0.1\) é aproximadamente: \[ [1, 1.025) \]
O problema: Qualquer intervalo \((1-\delta, 1+\delta)\) com \(\delta > 0\) conterá pontos que não pertencem a este conjunto. Especificamente, conterá pontos em \((1-\delta, 1)\) onde \(f(x) = x \approx 1\), e portanto \(|f(x) - 2| \approx 1 > 0.1\).
A única maneira de evitar isso seria tomar \(\delta = 0\), mas isso viola a definição de limite que exige \(\delta > 0\). Esta impossibilidade de encontrar um \(\delta > 0\) tal que a vizinhança perfurada de \(1\) esteja contida no conjunto onde \(|f(x) - 2| < \varepsilon\) caracteriza a não existência do limite.
Code
# Código corrigido para plotar a função por partes (legendas em texto simples)
import numpy as np
import matplotlib.pyplot as plt
def f_piece(x):
return np.where(x < 1, x, 2 * x**2)
# Domínios separados para desenhar as duas partes claramente
x_left = np.linspace(0.5, 0.999, 400)
x_right = np.linspace(1, 1.5, 400)
y_left = f_piece(x_left)
y_right = f_piece(x_right)
fig, ax = plt.subplots(figsize=(8, 4))
# Plot das duas parcelas (sem especificar cores)
ax.plot(x_left, y_left, label=r"$f(x)=x, x<1$")
ax.plot(x_right, y_right, label=r"$f(x)=2x^2, x>=1$")
# Marcar limites laterais em x=1
x0 = 1.0
left_limit = 1.0 # lim x->1^- f(x) = 1
right_limit = 2.0 # lim x->1^+ f(x) = 2
value_at_1 = 2.0 # f(1) = 2*1^2 = 2
# Limite pela esquerda: ponto aberto em (1,1)
ax.plot(
x0,
left_limit,
marker="o",
markersize=8,
markerfacecolor="none",
markeredgewidth=1.2,
label=r"$\lim_{x->1^-} f(x) = 1$ (aberto)",
)
# Limite pela direita: ponto aberto em (1,2)
ax.plot(
x0,
right_limit,
marker="o",
markersize=8,
markerfacecolor="none",
markeredgewidth=1.2,
label=r"$\lim_{x->1^+}f(x) = 2$ (aberto)",
)
# Valor da função em x=1: ponto preenchido
ax.plot(x0, value_at_1, marker="o", markersize=8, label="f(1)=2 (valor)")
ax.set_xlabel("$x$")
ax.set_ylabel("$f(x)$")
ax.set_title("Função por partes com descontinuidade em x=1")
ax.legend(loc="upper left")
ax.grid(True)
plt.show()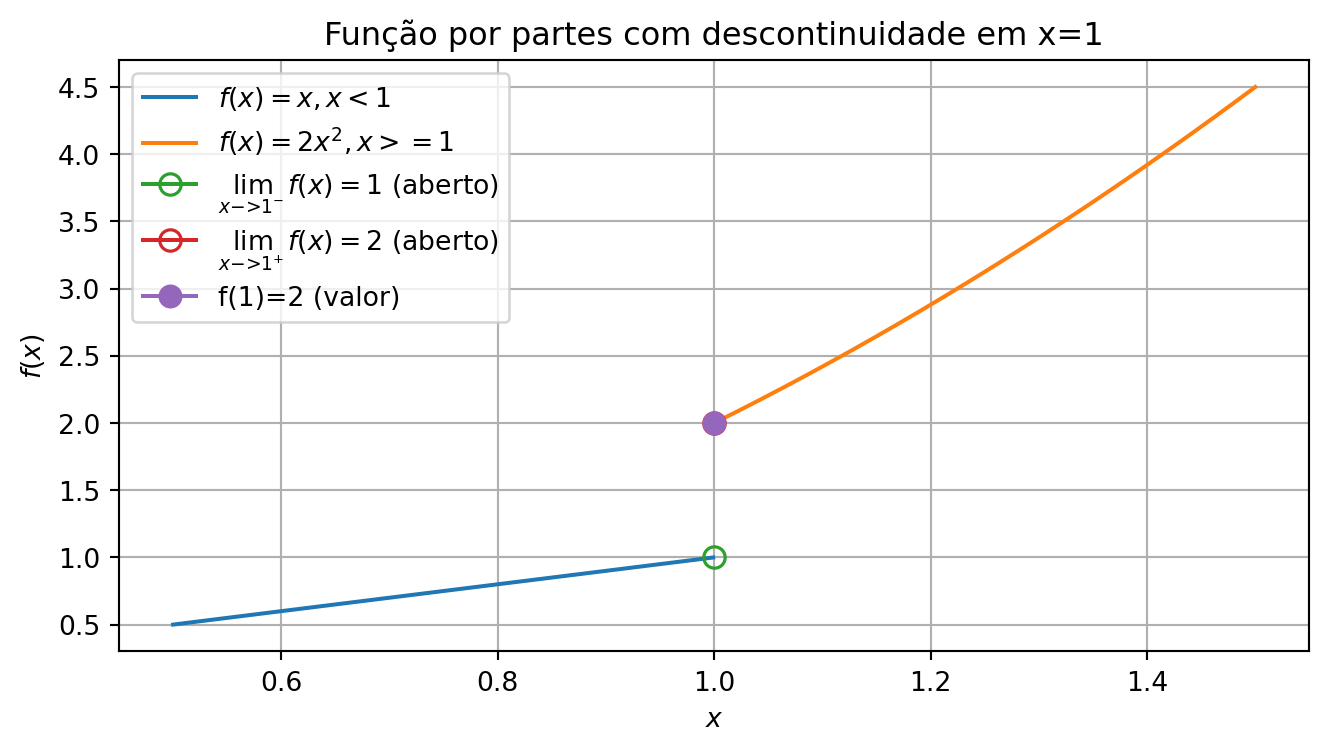
Exercícios
- Explique em palavras simples o que significa o limite \(\lim_{x \to p} f(x) = L\) usando a ideia de \(\varepsilon\) e \(\delta\).
- Para \(f(x) = 3x + 1\), calcule \(\delta\) correspondente a \(\varepsilon = 0.1\) quando \(x \to 2\).
- Por que a escolha de \(\delta = \min(|x_1 - p|, |x_2 - p|)\) garante que todos os valores de \(x\) dentro de \((p-\delta, p+\delta)\) levam \(f(x)\) para dentro da faixa \(|f(x)-L|<\varepsilon\)?
- Considere a função por partes \[ f(x) = \begin{cases} x & \text{se } x < 1 \\ 2x^2 & \text{se } x \ge 1 \end{cases} \] e \(\varepsilon = 0.1\). Mostre que não existe \(\delta > 0\) que satisfaça a definição de limite em \(x=1\).
- Explique como a descontinuidade em \(x=1\) impede a existência do limite \(\lim_{x \to 1} f(x)\).